Publications
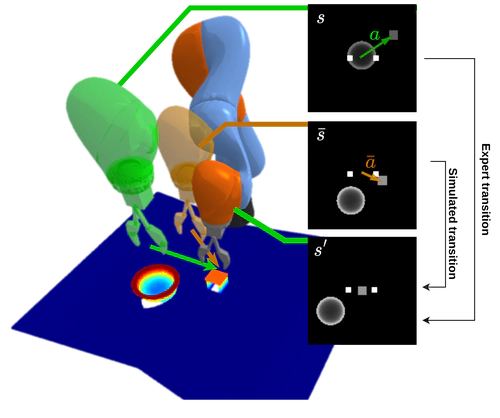
(2025).
On-Robot Reinforcement Learning with Goal-Contrastive Rewards.
In ICRA'25.
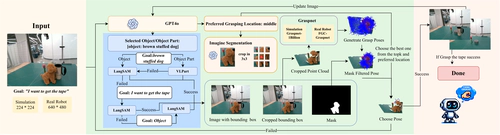
(2024).
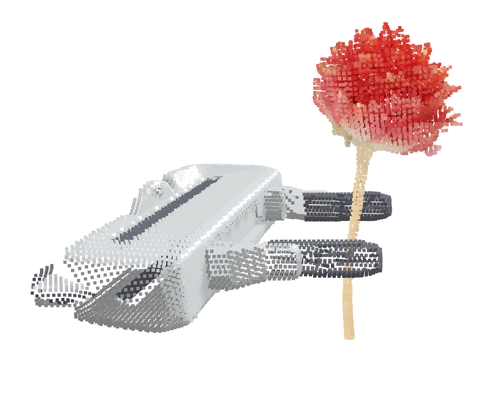
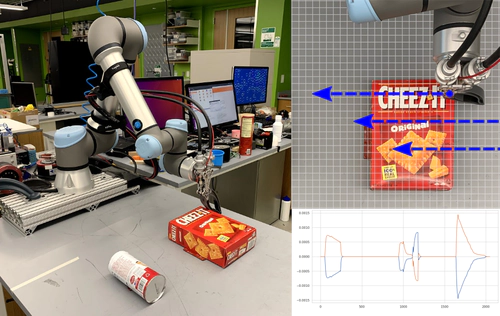
ThinkGrasp: A Vision-Language System for Strategic Part Grasping in Clutter.
In CoRL 2024.
(2024).
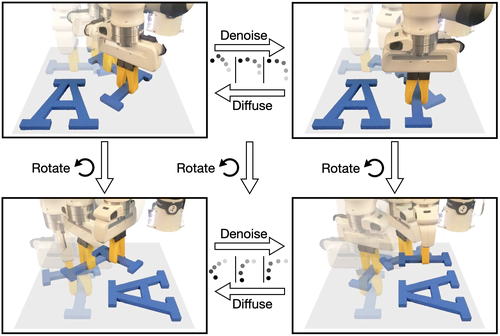
Equivariant Diffusion Policy.
In CoRL 2024.
(2024).
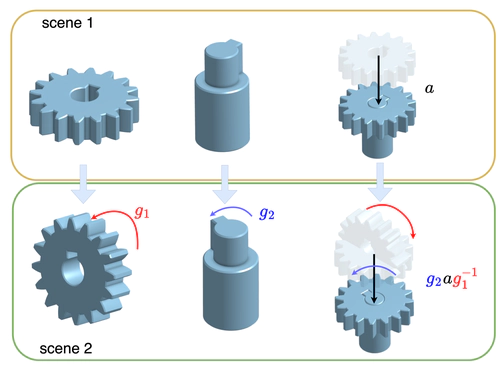
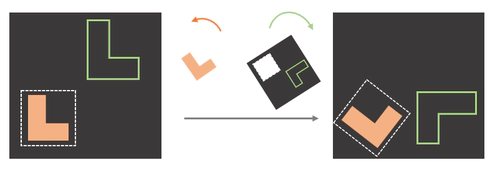
Leveraging Pick and Place Symmetries.
In IJRR 2024.
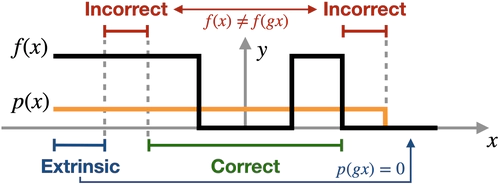
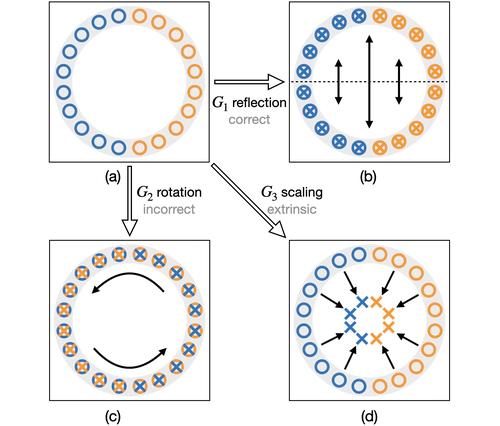
(2023).
A General Theory of Correct, Incorrect, and Extrinsic Equivariance.
In NeurIPS 2023.
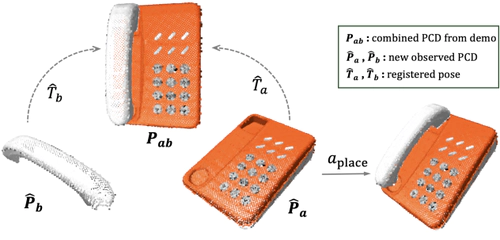
(2023).
One-shot Imitation Learning via Interaction Warping.
In CoRL'23.
(2023).
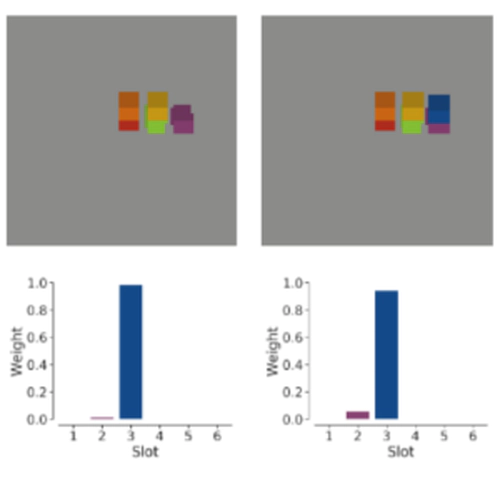
Invariant Slot Attention: Object Discovery with Slot-Centric Reference Frames.
In ICML'23.
(2023).
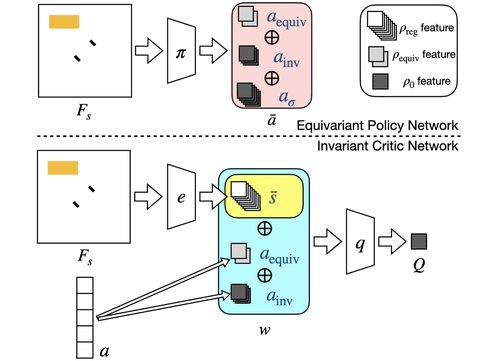
Equivariant Reinforcement Learning under Partial Observability.
In CoRL 2023.
(2023).
On Robot Grasp Learning Using Equivariant Models.
In Autonomous Robots.

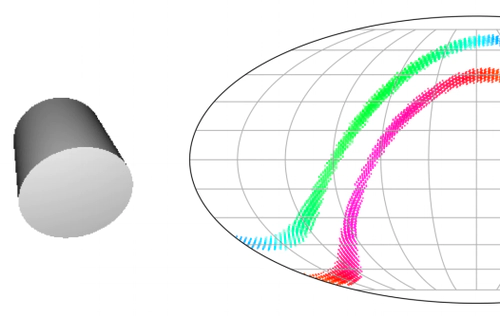
(2023).
Image to Sphere: Learning Equivariant Features for Efficient Pose Prediction.
In ICLR'23.
(2023).
SEIL: Simulation-augmented Equivariant Imitation Learning.
In ICRA 2023.
(2022).
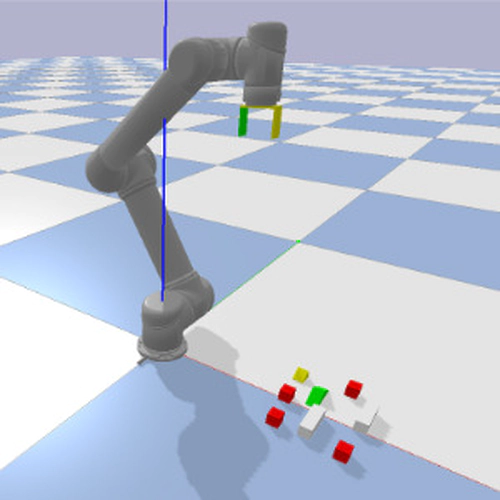
On-Robot Learning With Equivariant Models.
In CoRL 2022.
(2022).
Grasp Learning: Models, Methods, and Performance.
In Annual Review of Control, Robotics, and Autonomous Systems, Vol 6.

(2022).
Leveraging Fully Observable Policies for Learning under Partial Observability.
In CoRL 2022.
(2022).
Learning Symmetric Embeddings for Equivariant World Models.
In ICML'22.
(2022).
Visual Foresight With a Local Dynamics Model.
ISRR 2022.
(2022).
Understanding the Mechanism behind Data Augmentation's Success on Image Based RL.
In RLDM'22.
(2022).
Graph-Structured Policy Learning for Multi-Goal Manipulation Tasks.
In IROS'22.
(2022).
Binding Actions to Objects in World Models.
In ICLR'22 WOSC.
(2022).
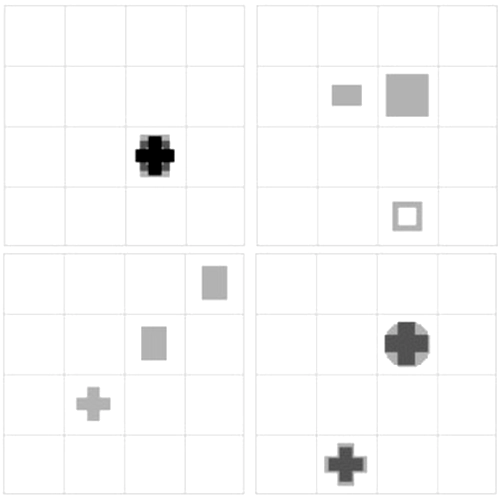
Equivariant Transporter Network.
In RSS 2022.
(2022).
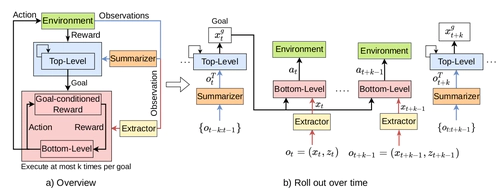
Hierarchical Reinforcement Learning under Mixed Observability.
In WAFR 2022.
(2022).
Sample Efficient Grasp Learning Using Equivariant Models.
In RSS 2022.

(2022).
Binding Actions to Objects in World Models.
In Preprint.
(2022).
Tactile Pose Estimation and Policy Learning for Unknown Object Manipulation.
In AAMAS 2022.
(2021).
Policy Learning for Visually Conditioned Tactile Manipulation.
In IROS 2021.
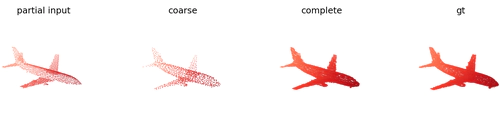
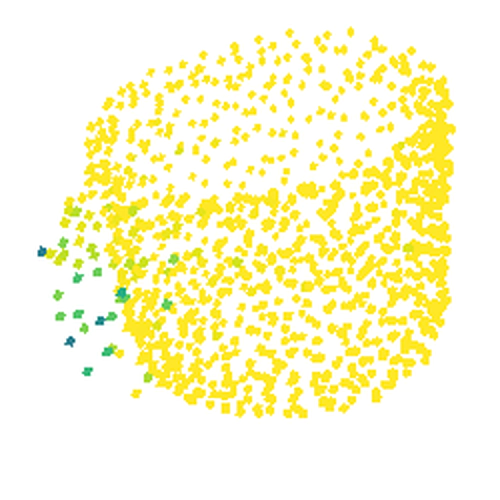
(2021).
GASCN: Graph Attention Shape Completion Network.
In (3DV 2021).
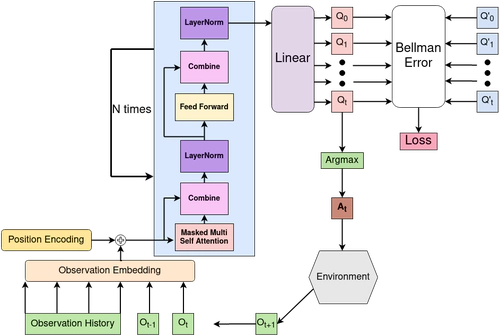
(2021).
Deep Transformer Q-Networks for Partially Observable Reinforcement Learning.
In Preprint.
(2021).
Action Priors for Large Action Spaces in Robotics.
In AAMAS'21.
(2021).
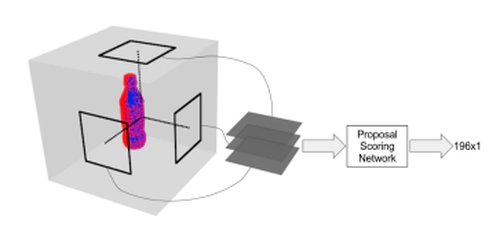
Efficient and Accurate Candidate Generation for Grasp Pose Detection in SE(3).
In IROS 2021.
(2021).
Learning Discrete State Abstractions With Deep Variational Inference.
In AABI'21.
(2020).
Learning bayes filter models for tactile localization.
In IROS 2020.
(2020).
Belief-Grounded Networks for Accelerated Robot Learning under Partial Observability.
In CoRL 2020.
(2020).
Learning Manipulation Skills Via Hierarchical Spatial Attention .
In T-RO.
(2019).
Towards Assistive Robotic Pick and Place in Open World Environments.
In ISRR 2019.
(2019).
Learning 6-DoF Grasping and Pick-Place Using Attention Focus.
In AAAI 2019.
(2019).
Online Abstraction with MDP Homomorphisms for Deep Learning.
In AAMAS'19.

(2018).
Pick and Place Without Geometric Object Models.
In ICRA 2018.


(2017).
Grasp Pose Detection in Point Clouds.
In IJRR.
(2017).
Open World Assistive Grasping Using Laser Selection.
In ICRA 2017.

(2017).
Viewpoint Selection for Grasp Detection.
In IROS 2017.
(2016).
High precision grasp pose detection in dense clutter.
In IROS 2016.
(2015).
Using Geometry to Detect Grasp Poses in 3D Point Clouds..
In ISRR 2015.
(2014).
Localizing Handle-Like Grasp Affordances in 3D Point Clouds.
In ISER 2014.
