The Helping Hands Lab
@Northeastern University
The Helping Hands Lab develops perception, planning, and control algorithms for robot manipulation in unstructured environments. We are particularly interested in robots that work with humans in built-for-human environments.
Publications
(2025).
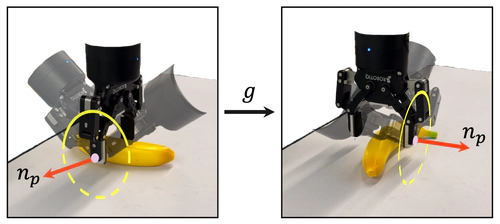
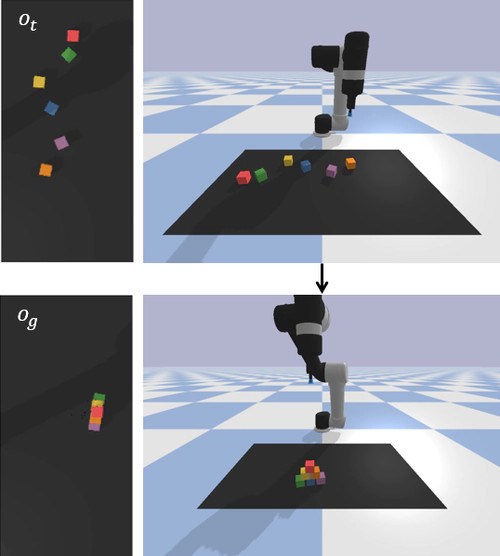
On-Robot Reinforcement Learning with Goal-Contrastive Rewards.
In ICRA'25.
(2024).
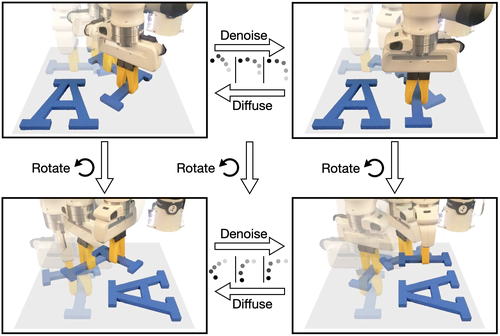
Equivariant Diffusion Policy.
In CoRL 2024.
(2024).
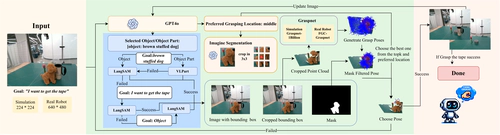
ThinkGrasp: A Vision-Language System for Strategic Part Grasping in Clutter.
In CoRL 2024.
(2024).
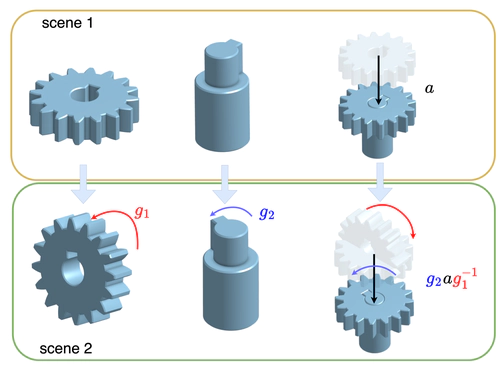
Leveraging Pick and Place Symmetries.
In IJRR 2024.
(2023).
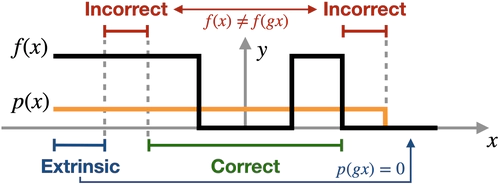
A General Theory of Correct, Incorrect, and Extrinsic Equivariance.
In NeurIPS 2023.
(2023).
Invariant Slot Attention: Object Discovery with Slot-Centric Reference Frames.
In ICML'23.