Source Themes
(2022).
Binding Actions to Objects in World Models.
In Preprint.
(2021).
GASCN: Graph Attention Shape Completion Network.
In (3DV 2021).
(2021).
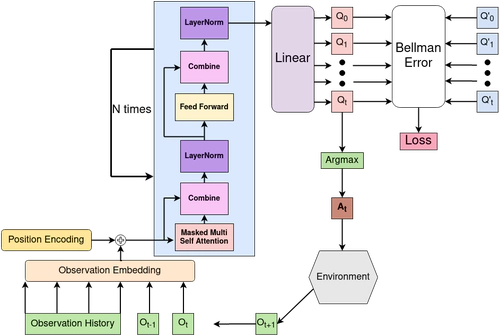
Deep Transformer Q-Networks for Partially Observable Reinforcement Learning.
In Preprint.
(2021).
Action Priors for Large Action Spaces in Robotics.
In AAMAS'21.
(2021).
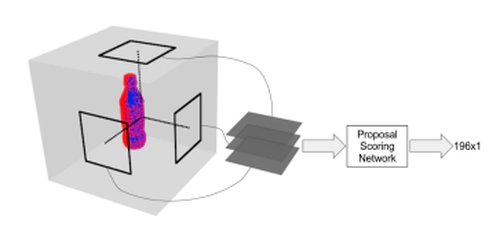
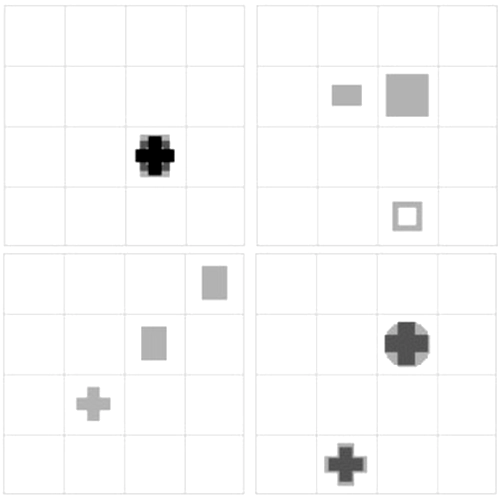
Efficient and Accurate Candidate Generation for Grasp Pose Detection in SE(3).
In IROS 2021.
(2021).
Learning Discrete State Abstractions With Deep Variational Inference.
In AABI'21.
(2020).
Belief-Grounded Networks for Accelerated Robot Learning under Partial Observability.
In CoRL 2020.