 Image credit: Unsplash
Image credit: Unsplash
Abstract
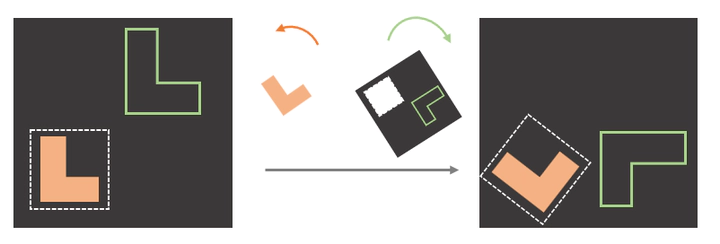
Many challenging robotic manipulation problems can be viewed through the lens of a sequence of pick and pick-conditioned place actions. Recently, Transporter Net proposed a framework for pick and place that is able to learn good manipulation policies from a very few expert demonstrations. A key reason why Transporter Net is so sample efficient is that the model incorporates rotational equivariance into the pick-conditioned place module, i.e., the model immediately generalizes learned pick-place knowledge to objects presented in different pick orientations. This work proposes a novel version of Transporter Net that is equivariant to both pick and place orientation. As a result, our model immediately generalizes pick-place knowledge to different place orientations in addition to generalizing pick orientation as before. Ultimately, our new model is more sample efficient and achieves better pick and place success rates than the baseline Transporter Net model. Our experiments show that only with 10 expert demonstrations, Equivariant Transporter Net can achieve greater than 95% success rate on 7/10 tasks of unseen configurations of Ravens-10 Benchmark. Finally, we augment our model with the ability to grasp using a parallel-jaw gripper rather than just a suction cup and demonstrate it on both simulation tasks and a real robot.