1
(2021).
Learning Discrete State Abstractions With Deep Variational Inference.
In AABI'21.
(2020).
Learning bayes filter models for tactile localization.
In IROS 2020.
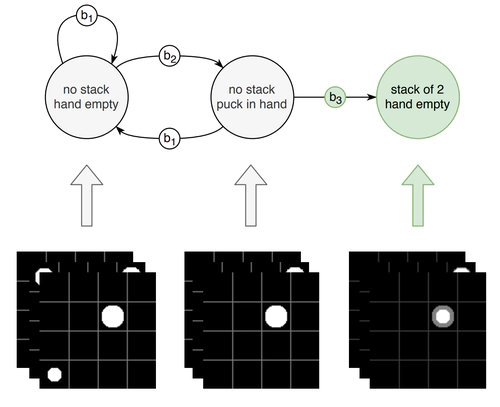
(2020).
Belief-Grounded Networks for Accelerated Robot Learning under Partial Observability.
In CoRL 2020.
(2020).
Learning Manipulation Skills Via Hierarchical Spatial Attention .
In T-RO.
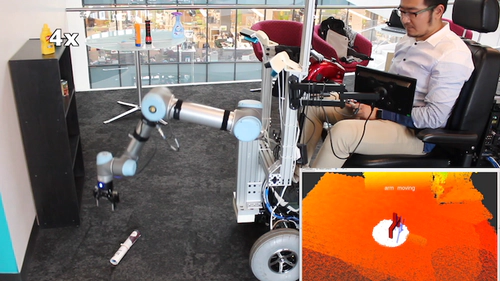
(2019).
Towards Assistive Robotic Pick and Place in Open World Environments.
In ISRR 2019.
(2019).
Learning 6-DoF Grasping and Pick-Place Using Attention Focus.
In AAAI 2019.
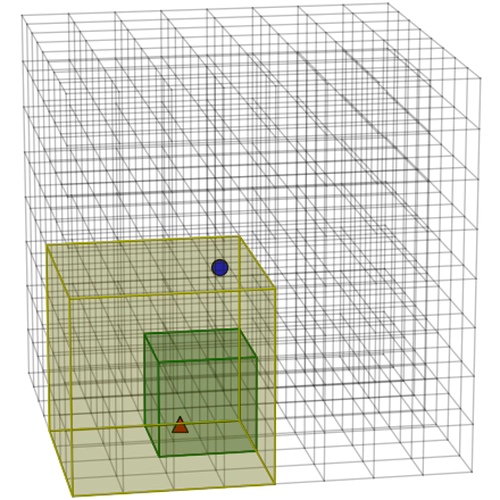
(2019).
Online Abstraction with MDP Homomorphisms for Deep Learning.
In AAMAS'19.

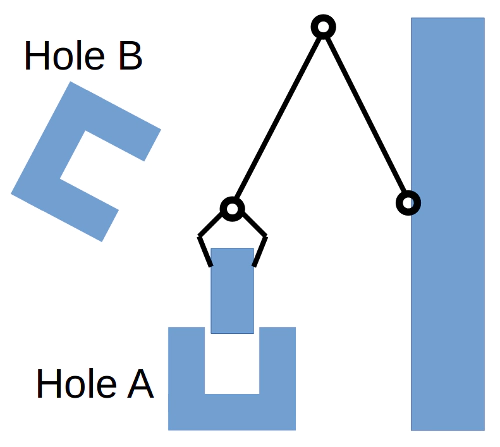
(2018).
Pick and Place Without Geometric Object Models.
In ICRA 2018.
